
|
Figure 1. A glider travels on an inclined air track. |
Figure 1 shows a glider traveling on an inclined air track. From previous experiments, we know that weight will be acting on the glider. But if the weight were the only force, then the glider would accelerate straight down. It does not do this and follows the incline provided by the air track. So, there must be another force acting.
The Free Body Diagram
Figure 2 shows a drawing and a free body diagram for this experiment. The angle q is the angle of the incline from the horizontal. The right side of the figure shows an x'-y' coordinate system. Here, y' is perpendicular to the incline and x' is parallel to the incline. Notice that the weight has been broken into its components along the x'-y' axes. Also notice the double strike through on the original W vector. This is to remind us not to use it once we have broken it into components. We don't want to add it into our analysis twice.
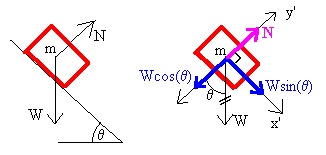
Now, the glider is accelerating down the incline which is the positive x' direction in the figure. Since the normal force is perpendicular to the incline, it cannot cause the acceleration. Remember that the acceleration and the net force must always be in the same direction.
Analyzing the free body diagram in the x' direction we have:
Fnetx' = max'
Wsin(q) = max'
mgsin(q) = max'
gsin(q) = ax'
Our free body diagram analysis has predicted that the object's x' acceleration will be gsin(q). If this analysis is correct, then this will be the experimental acceleration in the x' direction.
It is sometimes useful to look at the extremes. If q is zero, then the incline will be horizontal. And our analysis predicts the acceleration will be zero ( gsin(0o) = 0). If q is 90o, then the incline will be vertical. And our analysis predicts the acceleration will be g ( gsin(90o) = g). Does this make sense?
Analyzing the free body diagram in the y' direction we have:
Fnety' = may'
N - Wcos(q) = may'
But, ay' is zero so:
N = Wcos(q)
What is N when the incline is horizontal? What is N when the incline is vertical? Do your conclusions make sense?
Now, our analysis suggests that there will be an acceleration in the x' direction. However, the computer has a different coordinate system. How do they relate? Figure 3 shows both the x-y and x'-y' coordinate axes. Notice that the acceleration in the x' direction is at an angle q below the x axis.

Examining Figure 3 and remembering that ax' = gsin(q), we see that:
ax = ax'cos(q) = gsin(q)cos(q) in the positive x direction.
ay = ax'sin(q) = gsin2(q) in the negative y direction.
Therefore, if we can find q then the model predicts the x and y accelerations above.
Two dimensional equations for constant acceleration
Table 1 shows the two dimensional equations for constant acceleration. Notice the similarity to these equations and those for projectile motion. The only difference is the addition of the acceleration terms in the x direction. It would be easy to get the projectile equations from the equations in Table 2 by realizing that ax is zero.
Table 1. Two dimensional equations for constant acceleration.
| x direction | y direction |
| x = xo+ vxot + 0.5axt2 | y = yo+ vyot + 0.5ayt2 |
| Dx = vxot + 0.5axt2 | Dy = vyot + 0.5ayt2 |
| vx = vxo + axt | vy = vyo + ayt |
| px = mvx | py = mvy |
| Fnetx = max | Fnety = may |
Finding the Resultant Vectors
Once you have values for xo, vxo, yo, vyo, ax, ay, and m, then you can write equations for x, y, Dx, Dy, vx, vy, px, py, Fnetx, and Fnety as functions of time. You can then substitute a time into any or all of these equations and use your numerical answers to find the resultant vectors at this time. Table 2 summarizes how to find the magnitudes and directions for the vector quantities. Make sure you get the direction in the correct quadrant.
Table 2. Resultant vectors' magnitudes and directions.
| Vector | magnitude | direction |
| Position (R) | (x2 + y2)0.5 | tan-1(y/x) |
| Displacement (D) | (Dx2 + Dy2)0.5 | tan-1(Dy/Dx) |
| Velocity (v) | (vx2 + vy2)0.5 | tan-1(vy/vx) |
| Momentum (p) | (px2 + py2)0.5 | tan-1(py/px) |
| Acceleration (a) | (ax2 + ay2)0.5 | tan-1(ay/ax) |
| Force (Fnet) | (Fx2 + Fy2)0.5 | tan-1(Fy/Fx) |
Note: In the above table, Fx and Fy have been used instead of Fnetx and Fnety for formatting reasons.